Mission Overview
Mission Objectives
- • Novel descent control & innovative materials
- • Innovative sensor & communication system
- • Video capture from separation to touchdown
- • HAM radio / advanced beacon recovery
- • Quality & reliability analysis
Design Constraints
- • Mass: 0.700 kg (±0.050 kg)
- • Diameter: ≤ 0.125 m
- • Height: ≤ 0.310 m
- • Launch Altitude: 800–900 m
Parachute System
- • 1st Deploy: At separation
- • Initial Descent: 20 m/s (±5 m/s)
- • 2nd Deploy: 500 m (±10 m)
- • Final Descent: 5 m/s
Concept of Operations
5-stage mission from pre-launch to recovery
System Architecture
Flight Computer
Custom flight control system managing telemetry, sensor fusion, and deployment sequences with real-time data transmission.
Power System
Optimized power distribution system ensuring reliable operation throughout the mission phases.
Telemetry System
Advanced communication system with HAM radio and beacon for real-time ground station data relay.
Deployment Mechanism
Dual-stage parachute deployment system with altitude-based triggers for controlled descent velocity.
Meet the Team
Team Kalpana — NSUT, New Delhi

💡 Hover on desktop • Tap on mobile
CanSat Realisation
Two years of engineering — from concept to launch
Concept & Requirements
Defining mission objectives, design constraints, and system requirements for the dual-parachute CanSat.
Preliminary Design
Initial sketches, subsystem selection, and trade studies for structure, electronics, and descent control.
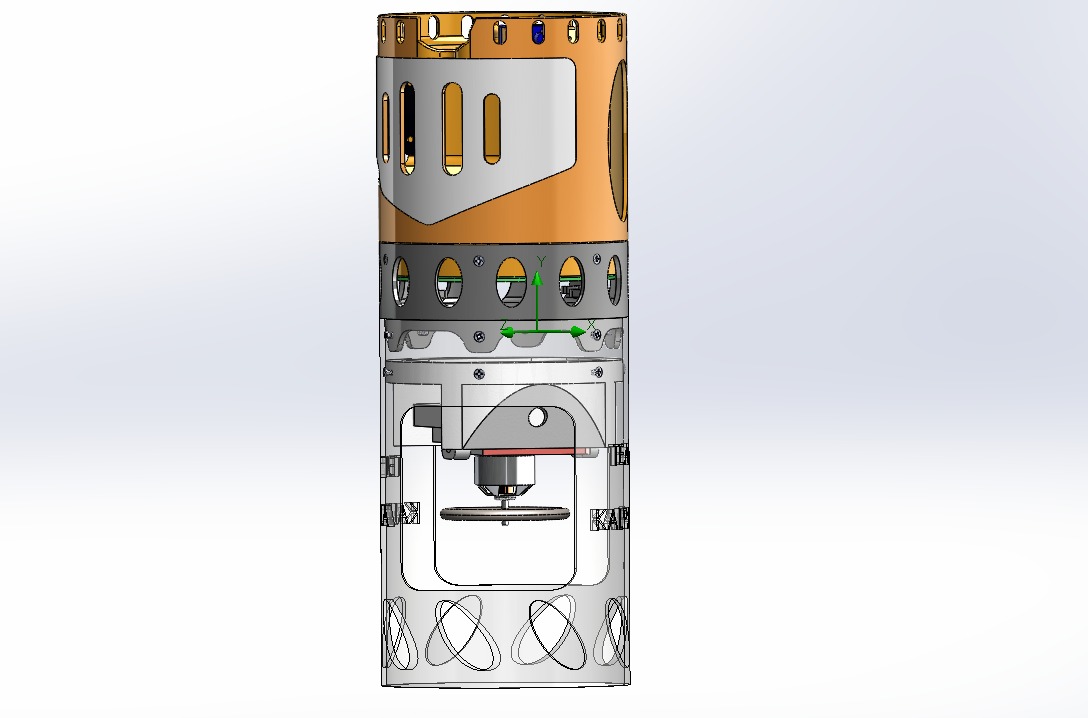
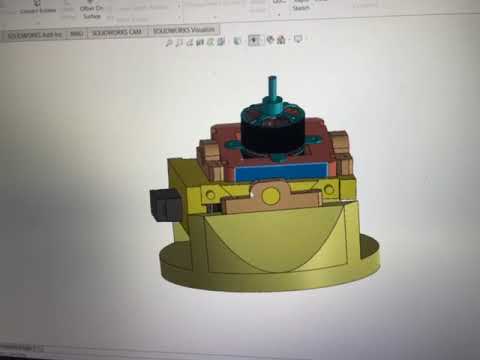
CAD Modelling
Full 3D CAD model developed in SolidWorks — airframe, gimbal assembly, parachute compartment, and lid mechanism.
PCB Design & Electronics
Custom flight computer PCB designed and fabricated — integrating sensors, radio, power management, and deployment circuits.
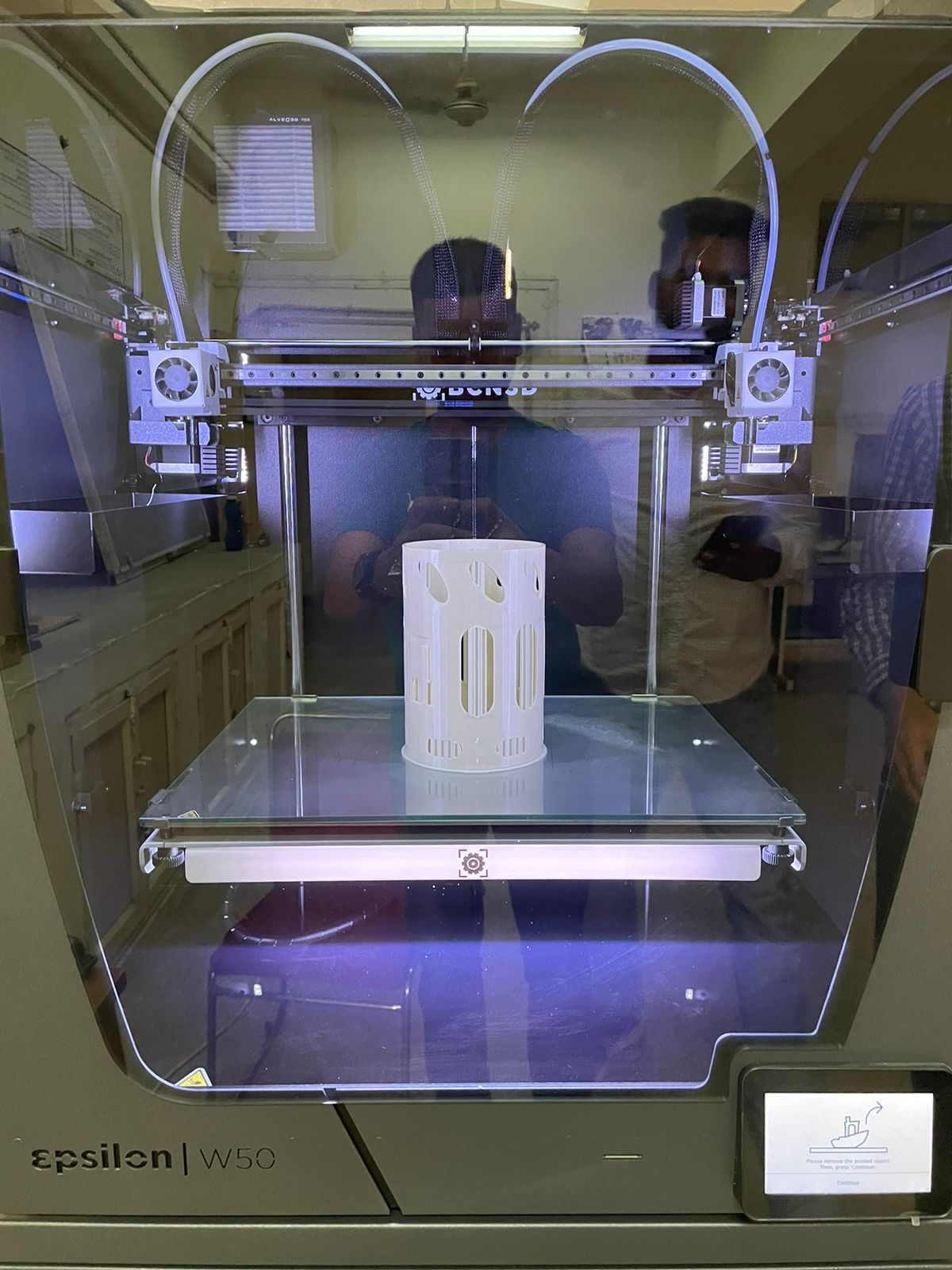
Structural Fabrication
Airframe parts 3D printed and machined. Structural analysis validated via Ansys FEA simulations.
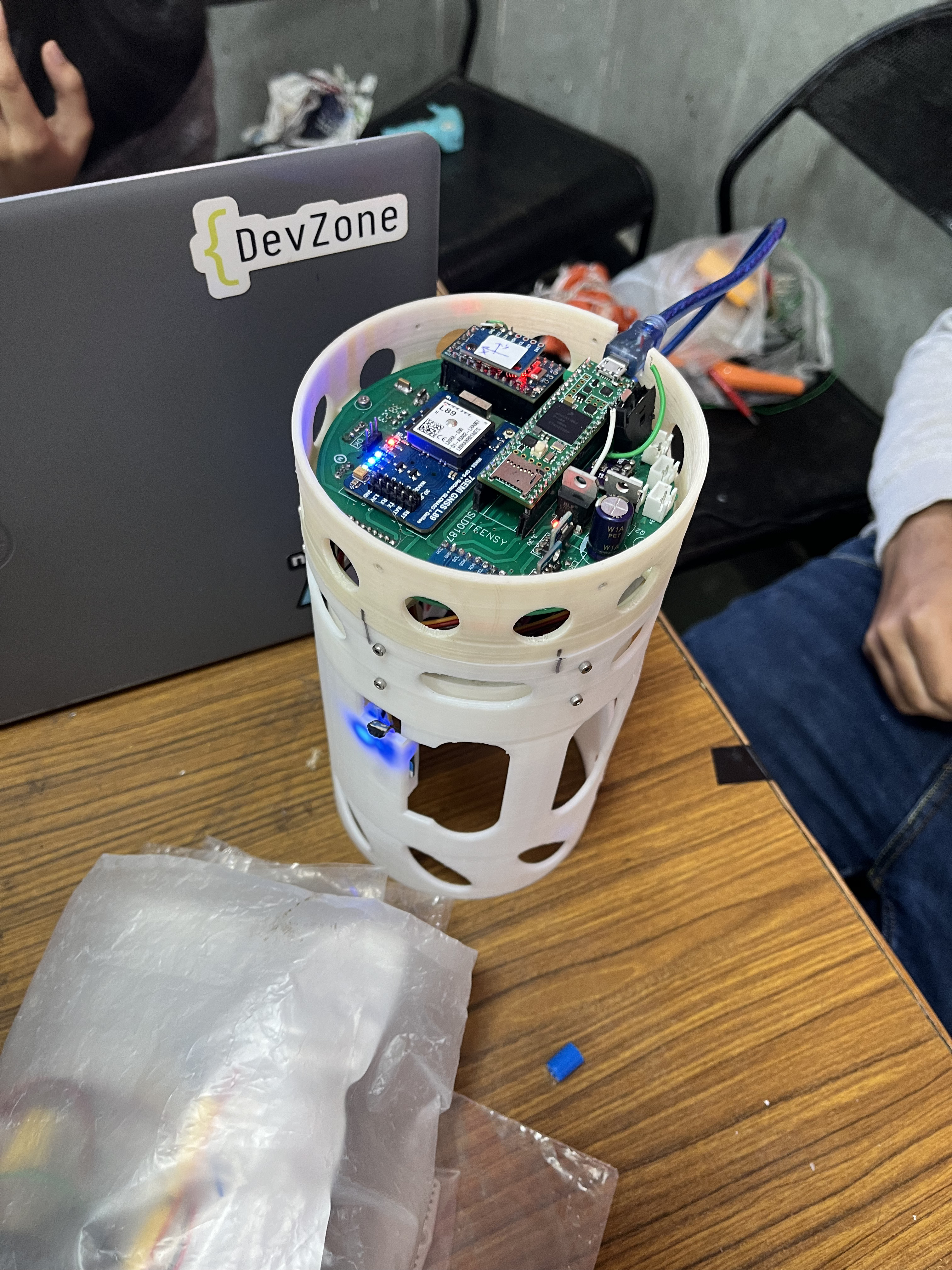
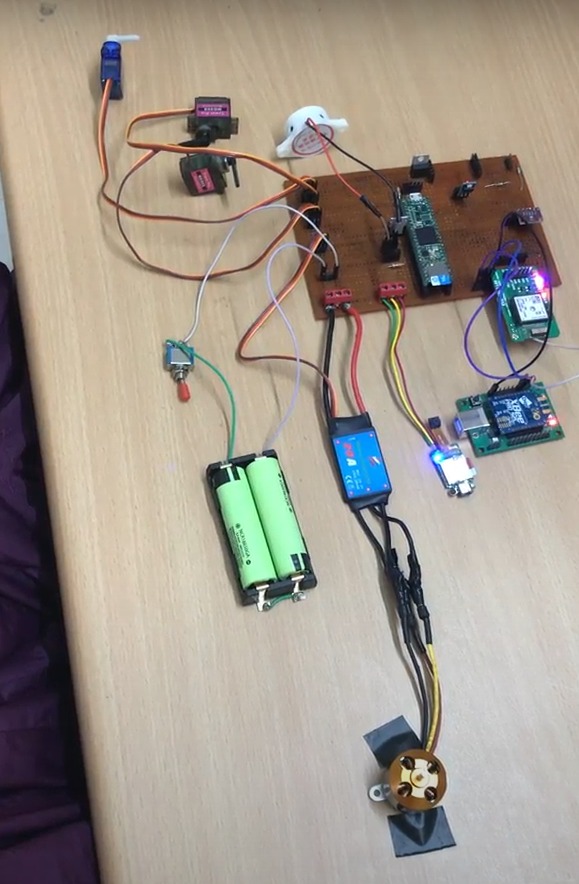
Integration & Assembly
Electronics bay populated, gimbal assembled, parachute packed — full system integrated for the first time.

Ground Testing
Sensor calibration, vacuum chamber tests, parachute deployment drop tests, and GCS communication verified.

Flight Readiness Review
Final physical assessment passed. CanSat cleared for launch after full system verification and documentation review.

Launch Day
CanSat launched at 800–900 m altitude. Dual parachute deployed successfully. Real-time telemetry received by ground station.

Mission Complete
Post-flight data analysis completed. Team Kalpana presented results at the Grand Finale — two years of work, one perfect flight.
1 / 10 • Use ← → keys or swipe to navigate
Flight & Testing
🚀 Launch Footage

🪂 Parachute Testing
Parachute Drop Test

GCS POV During Drop

Parachute Lid Opening

Short: Parachute Drop

Parachute Test 1

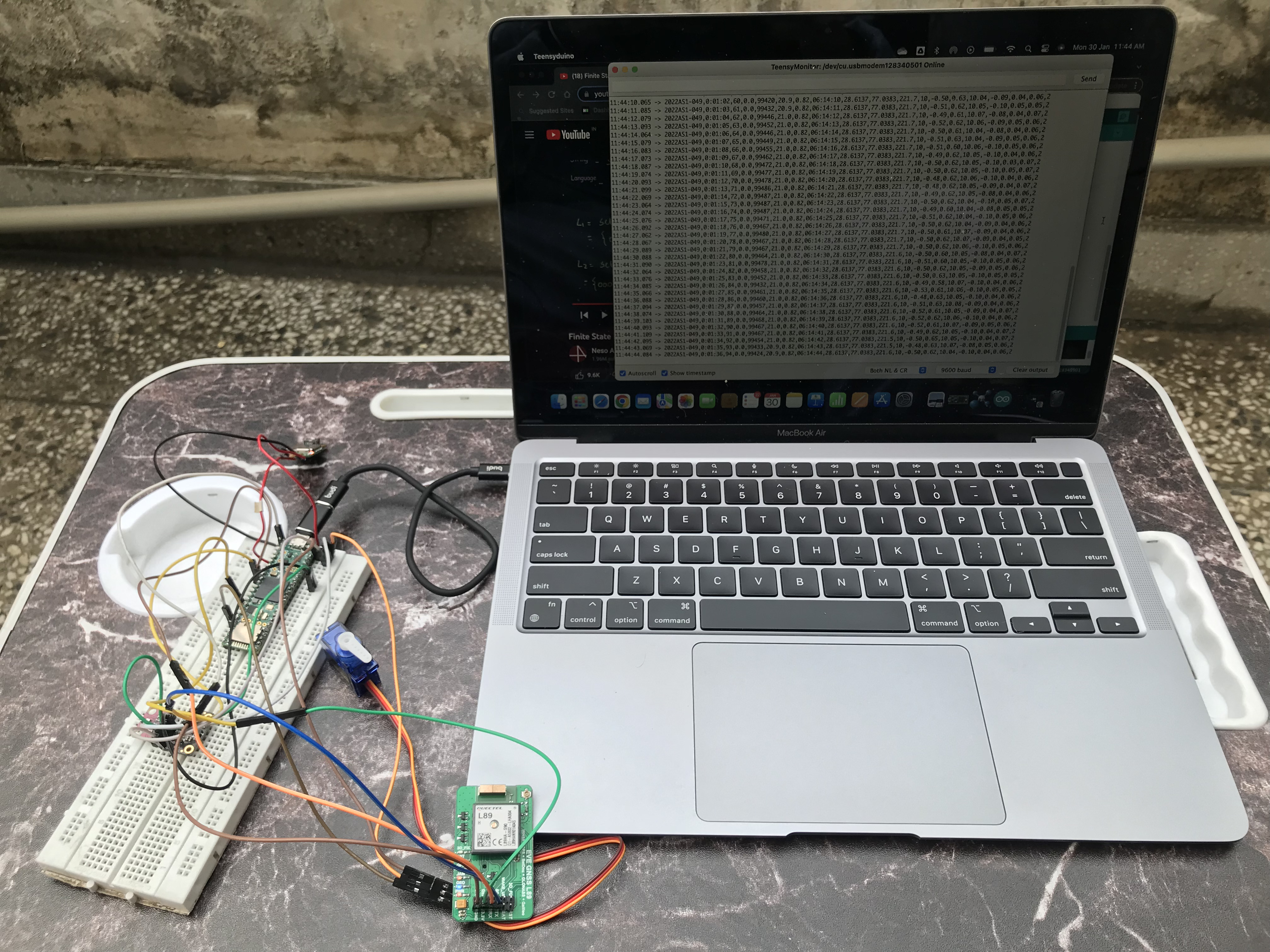
🎯 Sensor Testing
Gyroscope Test
General Testing Video

🔬 Structural Analysis
Total Deformation Analysis

Stress Test Simulation

🔧 Environmental Testing
Vacuum Chamber Test

GUI During Vacuum Test

📡 Ground Control Station
GCS Antenna Test

GUI Screen

GUI Attitude Screen

Command Driven Telemetry

GUI Demo

🔩 Hardware Assembly
Gimbals Assembly

Gimbals Test

Fit Check 1

Fit Check 2

💼 Market Pitch

Mission Gallery
Browse through albums from our CanSat journey
Loading gallery…
Technical Archive
Click any card to expand its documents
Presentations
Post Flight Review
Competition Guidelines
Spreadsheets
Display Materials
Certificate
Competition Recognition
Live Telemetry Replay
Interactive flight data — altitude, velocity & descent phase annotations
📂 Source: 2022ASI049_flight.csv • Altitude (m) and velocity (m/s) vs time
3D CAD Models
🔷 Rotate • Zoom • Pan
Assembled CanSat
Primary structure assembly
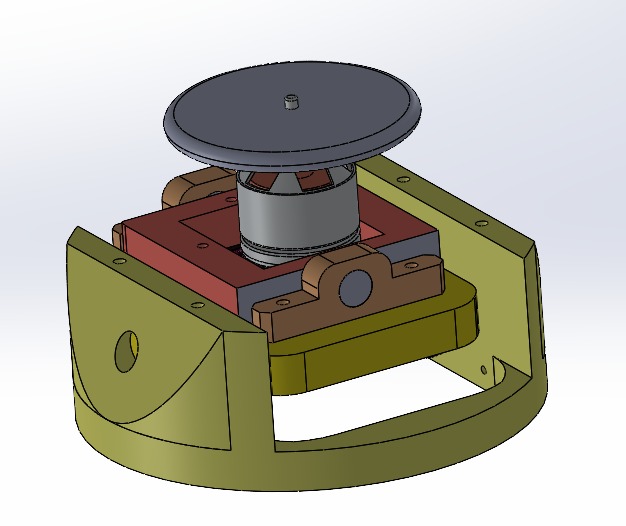
Gyro Assembly
3-DoF Active Control Gyro Mechanism
Our PCB
Printed circuit board for electronics
Lower Body
Lower body structure
Parachute Lid
Deployment mechanism cover
Parachute Compartment
Compartment for housing the parachute
💡 Click and drag to rotate • Scroll to zoom • Right-click drag to pan
Gyro Pitch Gimbal
Pitch Servo & BLDC Motor Mounting
Gyro Roll Gimbal
Roll Servo Mounting Structure
Hinge Part 1
Hinge mounting structure
Hinge Part 2
Hinge mounting structure
Hinge Shaft
Hinge shaft structure
Electronics Bay
Bay for housing electronics
Gyro Mounting Bracket
Bracket for mounting the gyro assembly
Open Source Code
Explore our flight software, telemetry systems, and ground control station code
View on GitFront